Multi-Agent Dynamic Relational Reasoning for Social Robot Navigation




A novel framework for multi-agent social navigation that integrates dynamic relational reasoning and collaborative decision-making, achieving enhanced safety and efficiency in complex social environments through real-time adaptability and strategic interaction modeling.
Dynamic Group Engagement with Our Approach
Real-World Experiments
Abstract
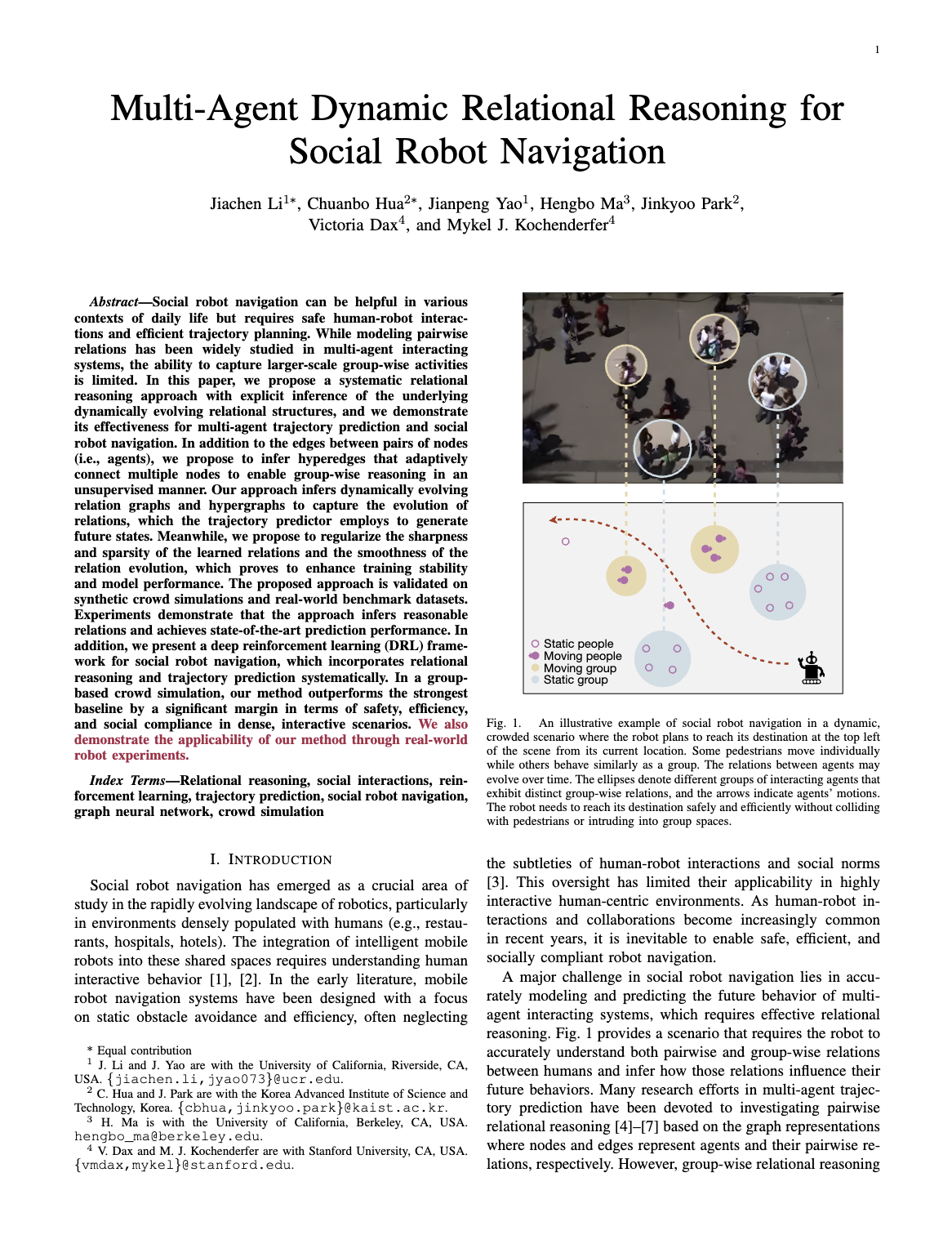
Social robot navigation can be helpful in various contexts of daily life but requires safe human-robot interactions and efficient trajectory planning. While modeling pairwise relations has been widely studied in multi-agent interacting systems, the ability to capture larger-scale group-wise activities is limited. In this paper, we propose a systematic relational reasoning approach with explicit inference of the underlying dynamically evolving relational structures, and we demonstrate its effectiveness for multi-agent trajectory prediction and social robot navigation. In addition to the edges between pairs of nodes (i.e., agents), we propose to infer hyperedges that adaptively connect multiple nodes to enable group-wise reasoning in an unsupervised manner. Our approach infers dynamically evolving relation graphs and hypergraphs to capture the evolution of relations, which the trajectory predictor employs to generate future states. Meanwhile, we propose to regularize the sharpness and sparsity of the learned relations and the smoothness of the relation evolution, which proves to enhance training stability and model performance. The proposed approach is validated on synthetic crowd simulations and real-world benchmark datasets. Experiments demonstrate that the approach infers reasonable relations and achieves state-of-the-art prediction performance. In addition, we present a deep reinforcement learning (DRL) framework for social robot navigation, which incorporates relational reasoning and trajectory prediction systematically. In a group-based crowd simulation, our method outperforms the strongest baseline by a significant margin in terms of safety, efficiency, and social compliance in dense, interactive scenarios.
Key Ideas and Contributions
2) Hypergraph Construction and Regularization: We design a novel hypergraph attention mechanism and flexible hyperedge construction, coupled with mechanisms to ensure relation sharpness, evolution smoothness, and sparsity, improving training stability and reducing prediction error.
3) Enhanced DRL for Navigation: We modify the deep reinforcement learning (DRL) framework to leverage inferred relationships and predicted trajectories, enhancing safety and efficiency in social robot navigation while adhering to human social norms.
4) State-of-the-Art Results: Our trajectory prediction method with relational reasoning achieves SOTA performance on both simulated and real-world datasets. The DRL-based navigation method demonstrates superior performance, social awareness, and appropriate behavior in real-world and group-based crowd scenarios.
Test Results